
Partie pratique : analyse de ma voiture radio-commandéee
Vue d’ensemble de ma voiture
Ma voiture télécommandée est un buggy MHDpro de la marque Scientific-MHD.
Voici la description de ma voiture par le fabriquant. J’ai mis en gras les termes que j’ai découvert dans la partie théorique.
Le Jumper est un Buggy radiocommandé électrique faisant partie de la famille MHDPRO.
C’est le premier Buggy 2 roues motrices tout équipé et prêt à rouler.
Livré avec accu de propulsion NimH 1800 mAh et son chargeur 220 volts il est idéal pour débuter en modélisme voiture.
Toute sa conception tient compte des chocs qu’il est susceptible de subir aux mains des pilotes débutants inexpérimentés.
Le châssis fraisé est en composite de nylon renforcé, toutes les pièces sont largement dimensionnées et la position très basse du moteur et de l’accu de propulsion permettent d’obtenir un centre de gravité très bas pour faciliter le pilotage.
L’accès extérieur au réglage du « slipper » permet d’optimiser les performances sans qu’il soit nécessaire de démonter quoi que se soit.
Caractéristiques principales : complètement assemblé avec moteur et radiocommande 2 voies à volant, équipé d’un moteur RC540 alimenté par un accu de propulsion NiMh de 7,2 V – 1800 mAh, d’un combiné récepteur/variateur de 35A et d’un puissant servo de direction.
- Carrosserie peinte et décorée.
- J’ai recherché ce qu’était un moteur RC540. C’est un moteur électrique à charbon (brushed).
Zoom sur quelques pièces
Le variateur envoie l’électricité au moteur électrique
 Le moteur transmet le mouvement à la pignonnerie qui est dans un petit boitier a coté du moteur
Le moteur transmet le mouvement à la pignonnerie qui est dans un petit boitier a coté du moteur
 À la sortie de la pignonnerie se trouve l’arbre qui transmet le mouvement aux roues arrières grâce au cardan (ici celle du coté droit).
À la sortie de la pignonnerie se trouve l’arbre qui transmet le mouvement aux roues arrières grâce au cardan (ici celle du coté droit).
 Le récepteur transmet aussi un signal au servo de direction qui fait pivoter les roues dans les différentes directions (roues avant). À la sortie du servo de direction on voit un système d’articulation qui pousse des tiges de direction reliées aux roues.
Le récepteur transmet aussi un signal au servo de direction qui fait pivoter les roues dans les différentes directions (roues avant). À la sortie du servo de direction on voit un système d’articulation qui pousse des tiges de direction reliées aux roues.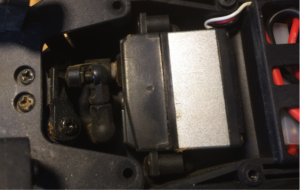
Sur cette photo des roues avant, on voit que le châssis s’appuie sur les amortisseurs pour ne pas frôler le sol. Et on voit aussi la tige de direction qui pousse les roues dans les deux sens.

Enfin, l’énergie électrique pour faire tourner le moteur, alimenter le récepteur variateur et le servo de direction vient de cette batterie :

Ma voiture
- Et voici à quoi ressemble ma voiture complète avec sa télécommande, la carrosserie enlevée et le servo de direction ouvert :
