
Les différentes parties de la voiture télécommandé
Sur une voiture télécommandée il y a beaucoup de pièces très intéressantes.
Sur la voiture il y a le châssis, la carrosserie, le moteur, les roues, le circuit de commande, le récepteur, la batterie, les amortisseurs.
La partie mécanique
Le châssis c’est comme le squelette de la voiture télécommandée. Le châssis sert à garder ensemble la batterie, le moteur, les roues, les amortisseurs et le moteur pour la direction. Le châssis doit être assez solide pour survivre aux chocs mais assez léger pour aller vite.
 Le châssis d’un buggy LRP
Le châssis d’un buggy LRP
Les roues sont importantes car elles assurent le contact avec le sol.
Sur les roues on peut mettre différents types de pneus. On choisit le type de pneus selon le type de sol (de la terre, du sable, des cailloux, du macadam ou un sol lisse comme un plancher de salle de sport).

Les amortisseurs servent à empêcher que les petits obstacles du terrain ne gênent la voiture

Le moteur est une des pièces les plus importantes sur la voiture car il sert à la propulser.
Dans une voiture télécommandée on peut mettre deux types de moteurs :
- thermique (qui brûle de l’essence), plus d’essence est brûlée, plus la voiture ira vite

- électrique, plus le courant est fort plus le moteur tourne vite

À la sortie du moteur il y a un arbre qui tourne. La transmission va amener le mouvement du moteur jusqu’aux roues. La transmission est un ensemble d’engrenages qui permettent de changer la vitesse et la direction du mouvement.
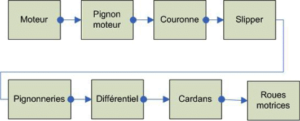
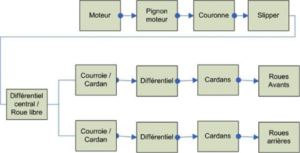
Les deux schémas suivants décrivent tous les composants :
- Dans le cas d’une voiture à deux roues motrices
- Dans le cas d’une voiture à quatre roues motrices (le différentiel central sert à faire tourner les quartes roues en même temps)
Le pignon moteur est directement fixé sur l’axe à la sortie du moteur, son rôle est d’entraîner la couronne et à sa suite l’ensemble de la transmission. Par ailleurs, le couple pignon moteur / couronne est le moyen le plus facile de régler le rapport de transmission.

La couronne est entraînée directement par le pignon moteur et transmet ensuite le mouvement soit au slipper pour les voitures qui en sont équipées, soit directement à la suite de la transmission.

Le slipper est un sorte d’embrayage qui permet de préserver la transmission des à-coups / blocages mais aussi de réguler le couple transmis aux roues lors des accélérations. Il est souvent constitué :
- d’une bague en téflon solidaire de la couronne
- de flasques non solidaires placées de chaque côté de la couronne
La couronne entraîne la bague sur laquelle glissent ou non les flasques qui transmettent alors en partie ou totalement le mouvement de rotation au reste de la transmission. Ainsi, si le couple est trop important (roues bloquées ou accélération trop brusque), les bagues vont patiner sur les flasques et transmettre moins de puissance. Le slipper se règle en serrant / desserrant son ressort de contrainte.
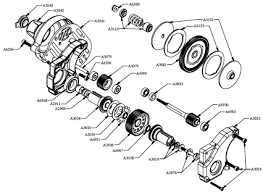
Le couple pignon moteur / couronne permet d’ajuster le rapport de réduction. Toutefois, la vitesse de la couronne est encore trop importante. Il faut donc rajouter des couples d’engrenages pour la diminuer : c’est la pignonnerie. On a ainsi le rapport interne de réduction. Le rapport interne est intrinsèque à la voiture et ne peut être modifié.Sur le dessin suivant on voit le slipper, la pignonnerie et le différentiel.
Pour les voitures deux roues motrices et pour les voitures quatre roues motrices, dans la chaîne du mouvement les différentiels permettent de faire tourner les roues de droite et de gauche à des vitesses différentes (quand la voiture tourne).
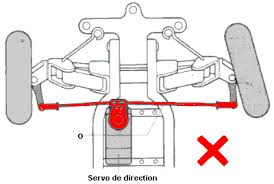
Pour que la voiture tourne, la direction permet de faire pivoter les roues avant vers la droite ou vers la gauche. Dans une vraie voiture c’est le conducteur en tournant le volant qui contrôle la direction, dans une voiture télécommandée c’est un petit servomoteur qui le fait.
Les cardans permettent de transmettre le mouvement à la roue même quand elle est inclinée.

L’énergie
La source d’énergie : il y a différentes sources pour faire fonctionner les voitures télécommandée.
Pour une voiture thermique c’est l’essence contenue dans un réservoir. Il existe différentes essences pour les petits moteurs R/C. La différence principale est la concentration en nitrométhane. Il en existe à 5%, 10%, 15% (ou 16%), 25%, 30 et même 33% pour les MT. Le reste du carburant est constitué de méthanol et d’huile (souvent de l’huile de ricin). Le méthanol est le carburant (élément qui brule quand il est mélangé au comburant) et fait fonctionner le moteur. L’oxygène est comburant qui permet la combustion du carburant. Le nitrométhane est un additif dopant le carburant par un apport d’oxygène au moment de la combustion par décomposition du nitrométhane.

pour une voiture électrique c’est l’énergie chimique accumulée dans une Il existe plusieurs technologies :
- Les accus NiCd ont pratiquement disparu
- Les batteries NI-MH (nickel métal hydride) offrent des améliorations en terme de capacité par rapport aux accus Ni-CD aux dépends de la durée de vie et du courant de décharge. Malgré cela, les avantages restent bien plus importants si on prend en considération le fait que les accus NI-MH n’utilisent pas des métaux lourds dans leur conception.
- Les accus les plus répandus aujourd’hui sont les LiPo (Lithium-polymères). Ces derniers offrent de bien meilleures performances à nos bolides que les anciens accus Ni-MH. Les batteries LI-PO sont utilisées pour leur très haute capacité dans un format ultra compact et léger. C’est la technologie du futur tant les avantages sur les autres batteries sont nombreux.
Dans le cas des voitures électriques, il y a aussi des voitures solaires (qui rechargent leurs batteries avec leurs panneaux solaires).
Pour que la voiture fonctionne on a besoin de commander deux choses :
- le servomoteur pour la direction
- la force du courant envoyé au moteur électrique ou la quantité d’essence envoyée au moteur thermique
C’est le rôle du circuit électronique: avec son récepteur, il reçoit les signaux radio envoyés par la télécommande, les analyse et transmet les signaux électriques de commandes au servomoteur de direction et au module de contrôle du moteur. Je vais expliquer ça dans un prochain article.